



4. BMS-i põhitarkvara funktsioonid
l Mõõtefunktsioon
(1) Põhiteabe mõõtmine: aku pinge, voolusignaali ja akupaki temperatuuri jälgimine. Aku haldussüsteemi kõige põhilisem funktsioon on akuelementide pinge, voolu ja temperatuuri mõõtmine, mis on aku haldussüsteemi kõigi tipptasemel arvutuste ja juhtimisloogika alus.
(2) Isolatsioonitakistuse tuvastamine: aku haldussüsteem peab testima kogu akusüsteemi ja kõrgepingesüsteemi isolatsiooni.
(3) Kõrgepinge blokeeringu tuvastamine (HVIL): kasutatakse kogu kõrgepingesüsteemi terviklikkuse kinnitamiseks. Kui kõrgepingesüsteemi vooluahela terviklikkus on kahjustatud, aktiveeritakse ohutusmeetmed.
lHinnangufunktsioon
(1) SOC ja SOH hindamine: põhiline ja kõige keerulisem osa
(2) Tasakaalustamine: reguleerige SOC x mahtuvuse tasakaalustamatust monomeeride vahel tasakaalustusahela abil.
(3) Aku võimsuse piiramine: aku sisend- ja väljundvõimsus on erinevatel SOC-temperatuuridel piiratud.
lMuud funktsioonid
(1) Relee juhtimine: sh peamine +, peamine -, laadimisrelee +, laadimisrelee -, eellaadimise relee
(2) Termiline kontroll
(3) Suhtlusfunktsioon
(4) Vea diagnoosimine ja häire
(5) Veakindel töö
5.BMS-i põhitarkvara funktsioonid
lMõõtefunktsioon
(1) Põhiteabe mõõtmine: aku pinge, voolusignaali ja akupaki temperatuuri jälgimine. Aku haldussüsteemi kõige põhilisem funktsioon on akuelementide pinge, voolu ja temperatuuri mõõtmine, mis on aku haldussüsteemi kõigi tipptasemel arvutuste ja juhtimisloogika alus.
(2) Isolatsioonitakistuse tuvastamine: aku haldussüsteem peab testima kogu akusüsteemi ja kõrgepingesüsteemi isolatsiooni.
(3) Kõrgepinge blokeeringu tuvastamine (HVIL): kasutatakse kogu kõrgepingesüsteemi terviklikkuse kinnitamiseks. Kui kõrgepingesüsteemi vooluahela terviklikkus on kahjustatud, aktiveeritakse ohutusmeetmed.
lHinnangufunktsioon
(1) SOC ja SOH hindamine: põhiline ja kõige keerulisem osa
(2) Tasakaalustamine: reguleerige SOC x mahtuvuse tasakaalustamatust monomeeride vahel tasakaalustusahela abil.
(3) Aku võimsuse piiramine: aku sisend- ja väljundvõimsus on erinevatel SOC-temperatuuridel piiratud.
lMuud funktsioonid
(1) Relee juhtimine: sh peamine +, peamine -, laadimisrelee +, laadimisrelee -, eellaadimise relee
(2) Termiline kontroll
(3) Suhtlusfunktsioon
(4) Vea diagnoosimine ja häire
(5) Veakindel töö
6.BMS-tarkvara arhitektuur
lKõrge ja madalpinge haldamine
Tavaliselt sisselülitatud olekus äratab VCU BMS-i 12 V kaabli- või CAN-signaali kaudu. Pärast BMS-i enesekontrolli lõpetamist ja ooterežiimi minekut saadab VCU kõrgepinge käsu ning BMS juhib relee sulgemist, et luua kõrgepingeühendus. Väljalülitatud olekus saadab VCU madalpinge käsu ja katkestab seejärel 12 V äratusühenduse. Kui püstol laadimiseks väljalülitatud olekus sisestatakse, saab selle äratada CP või A+ signaaliga.
lLaadimise haldamine
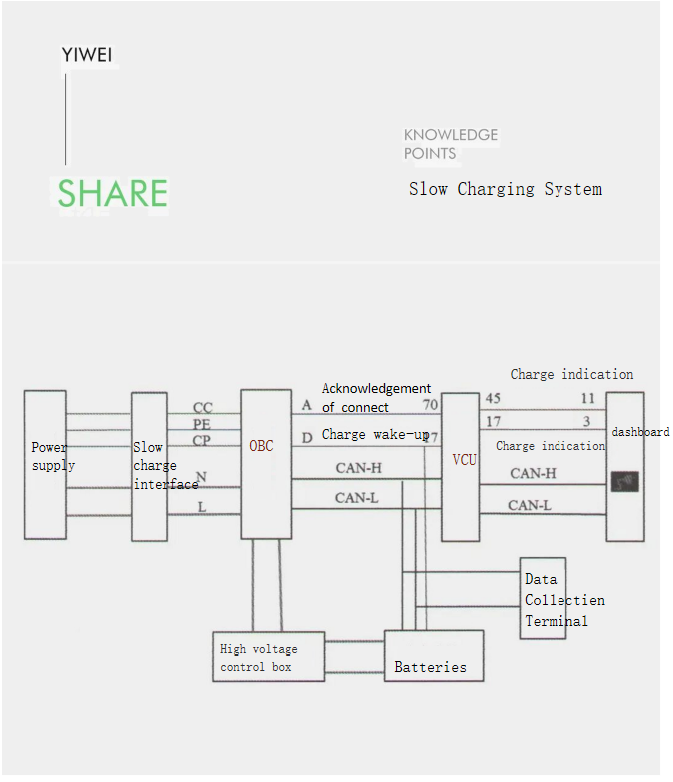
(1) Aeglane laadimine
Aeglane laadimine tähendab aku laadimist vahelduvvoolust alalisvooluga, mis muundatakse laadimisploki sisseehitatud laadija (või 220 V toiteallika) abil. Laadimisploki spetsifikatsioonid on üldiselt 16 A, 32 A ja 64 A ning seda saab laadida ka majapidamisvooluvõrgust. Aku juhtimissüsteemi saab äratada CC- või CP-signaaliga, kuid tuleb tagada, et see saaks pärast laadimise lõppu normaalselt magama jääda. Vahelduvvoolu laadimisprotsess on suhteliselt lihtne ja seda saab välja töötada vastavalt üksikasjalikele riiklikele standarditele.
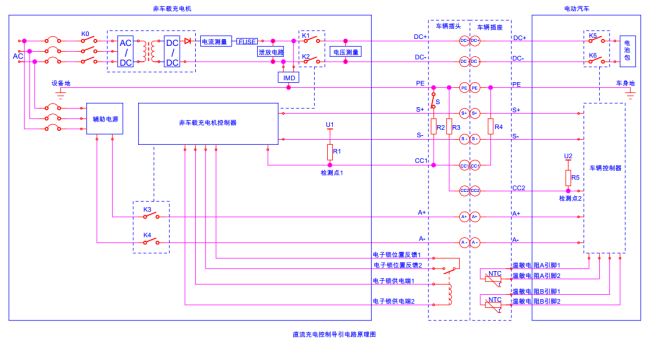
(2) Kiirlaadimine
Kiirlaadimine tähendab aku laadimist alalisvoolu väljundiga alalisvoolu laadimisplokist, mille abil saab saavutada 1C või isegi kõrgema laadimiskiiruse. Üldiselt saab 80% akust laadida 45 minutiga. Kiirlaadimise saab käivitada laadimisploki abitoiteallika A+ signaaliga.
lHinnangufunktsioon
(1) SOP (State of Power ehk võimsuse olek) hangib peamiselt aku hetkel saadaolevat laadimis- ja tühjendusvõimsust, otsides temperatuuri ja SOC-i tabeleid. VCU määrab saadetud võimsusväärtuse põhjal, kuidas kogu sõidukit kasutatakse.
(2) SOH (State of Health) iseloomustab peamiselt aku praegust seisukorda väärtusega 0–100%. Üldiselt arvatakse, et akut ei saa kasutada pärast selle langemist alla 80%.
(3) SOC (laadimisstaatuse) kuulub BMS-i põhijuhtimisalgoritmi hulka, mis iseloomustab praegust allesjäänud mahtuvust. See põhineb peamiselt amper-tunni integraalmeetodil ja EKF (laiendatud Kalmani filtri) algoritmil, mida kombineeritakse korrektsioonistrateegiatega (näiteks avatud ahela pinge korrektsioon, täislaadimise korrektsioon, laadimise lõpu korrektsioon, mahtuvuse korrektsioon erinevate temperatuuride ja SOH korral jne).
(4) SOE (energia oleku) algoritmi ei arenda kodumaised tootjad laialdaselt või kasutab see praeguse oleku ja maksimaalse saadaoleva energia suhte leidmiseks suhteliselt lihtsaid algoritme. Seda funktsiooni kasutatakse peamiselt järelejäänud sõiduulatuse hindamiseks.
lVea diagnoosimine
Aku erineva jõudluse järgi eristatakse erinevaid rikketasemeid ning BMS ja VCU rakendavad erinevate rikketasemete korral erinevaid töötlemismeetmeid, näiteks hoiatused, võimsuse piiramine või kõrgepinge otsene lahtiühendamine. Rikete hulka kuuluvad andmete kogumise ja ratsionaalsuse vead, elektrilised vead (andurid ja ajamid), sidevead ning aku oleku vead jne.
1.BMS-i põhitarkvara funktsioonid
lMõõtefunktsioon
(1) Põhiteabe mõõtmine: aku pinge, voolusignaali ja akupaki temperatuuri jälgimine. Aku haldussüsteemi kõige põhilisem funktsioon on akuelementide pinge, voolu ja temperatuuri mõõtmine, mis on aku haldussüsteemi kõigi tipptasemel arvutuste ja juhtimisloogika alus.
(2) Isolatsioonitakistuse tuvastamine: aku haldussüsteem peab testima kogu akusüsteemi ja kõrgepingesüsteemi isolatsiooni.
(3) Kõrgepinge blokeeringu tuvastamine (HVIL): kasutatakse kogu kõrgepingesüsteemi terviklikkuse kinnitamiseks. Kui kõrgepingesüsteemi vooluahela terviklikkus on kahjustatud, aktiveeritakse ohutusmeetmed.
lHinnangufunktsioon
(1) SOC ja SOH hindamine: põhiline ja kõige keerulisem osa
(2) Tasakaalustamine: reguleerige SOC x mahtuvuse tasakaalustamatust monomeeride vahel tasakaalustusahela abil.
(3) Aku võimsuse piiramine: aku sisend- ja väljundvõimsus on erinevatel SOC-temperatuuridel piiratud.
lMuud funktsioonid
(1) Relee juhtimine: sh peamine +, peamine -, laadimisrelee +, laadimisrelee -, eellaadimise relee
(2) Termiline kontroll
(3) Suhtlusfunktsioon
(4) Vea diagnoosimine ja häire
(5) Veakindel töö
2.BMS-tarkvara arhitektuur
lKõrge ja madalpinge haldamine
Tavaliselt sisselülitatud olekus äratab VCU BMS-i 12 V kaabli- või CAN-signaali kaudu. Pärast BMS-i enesekontrolli lõpetamist ja ooterežiimi minekut saadab VCU kõrgepinge käsu ning BMS juhib relee sulgemist, et luua kõrgepingeühendus. Väljalülitatud olekus saadab VCU madalpinge käsu ja katkestab seejärel 12 V äratusühenduse. Kui püstol laadimiseks väljalülitatud olekus sisestatakse, saab selle äratada CP või A+ signaaliga.
lLaadimise haldamine
(1) Aeglane laadimine
Aeglane laadimine tähendab aku laadimist vahelduvvoolust alalisvooluga, mis muundatakse laadimisploki sisseehitatud laadija (või 220 V toiteallika) abil. Laadimisploki spetsifikatsioonid on üldiselt 16 A, 32 A ja 64 A ning seda saab laadida ka majapidamisvooluvõrgust. Aku juhtimissüsteemi saab äratada CC- või CP-signaaliga, kuid tuleb tagada, et see saaks pärast laadimise lõppu normaalselt magama jääda. Vahelduvvoolu laadimisprotsess on suhteliselt lihtne ja seda saab välja töötada vastavalt üksikasjalikele riiklikele standarditele.
(2) Kiirlaadimine
Kiirlaadimine tähendab aku laadimist alalisvoolu väljundiga alalisvoolu laadimisplokist, mille abil saab saavutada 1C või isegi kõrgema laadimiskiiruse. Üldiselt saab 80% akust laadida 45 minutiga. Kiirlaadimise saab käivitada laadimisploki abitoiteallika A+ signaaliga.
lHinnangufunktsioon
(1) SOP (State of Power ehk võimsuse olek) hangib peamiselt aku hetkel saadaolevat laadimis- ja tühjendusvõimsust, otsides temperatuuri ja SOC-i tabeleid. VCU määrab saadetud võimsusväärtuse põhjal, kuidas kogu sõidukit kasutatakse.
(2) SOH (State of Health) iseloomustab peamiselt aku praegust seisukorda väärtusega 0–100%. Üldiselt arvatakse, et akut ei saa kasutada pärast selle langemist alla 80%.
(3) SOC (laadimisstaatuse) kuulub BMS-i põhijuhtimisalgoritmi hulka, mis iseloomustab praegust allesjäänud mahtuvust. See põhineb peamiselt amper-tunni integraalmeetodil ja EKF (laiendatud Kalmani filtri) algoritmil, mida kombineeritakse korrektsioonistrateegiatega (näiteks avatud ahela pinge korrektsioon, täislaadimise korrektsioon, laadimise lõpu korrektsioon, mahtuvuse korrektsioon erinevate temperatuuride ja SOH korral jne).
(4) SOE (energia oleku) algoritmi ei arenda kodumaised tootjad laialdaselt või kasutab see praeguse oleku ja maksimaalse saadaoleva energia suhte leidmiseks suhteliselt lihtsaid algoritme. Seda funktsiooni kasutatakse peamiselt järelejäänud sõiduulatuse hindamiseks.
lVea diagnoosimine
Aku erineva jõudluse järgi eristatakse erinevaid rikketasemeid ning BMS ja VCU rakendavad erinevate rikketasemete korral erinevaid töötlemismeetmeid, näiteks hoiatused, võimsuse piiramine või kõrgepinge otsene lahtiühendamine. Rikete hulka kuuluvad andmete kogumise ja ratsionaalsuse vead, elektrilised vead (andurid ja ajamid), sidevead ning aku oleku vead jne.
Võtke meiega ühendust:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Postituse aeg: 12. mai 2023



